GAMES202 高质量实时渲染
Lecture1 Introduce
实时:30fps以上
Interactive:10fps左右,一秒一帧两秒一帧is also acceptable
Lecture2 Review
渲染管线:渲染就是由模型数据变成图像数据的过程,而渲染管线设计就是现在的gpu完成的工作,首先物体在在模型数据中会被表示为一系列的点和其连接关系,我们需要将其加载到gpu的显存中(VBO),然后进行主要的两个阶段,分别是几何阶段和光栅化阶段。
-
首先是几何阶段,我们需要对顶点进行处理
-
首先使用vertex shader来处理这些顶点,将他们从世界坐标变化到NDC(model-view-projection),我们也可以在这里进行一些信息处理,如光照、阴影等;
-
接下来是曲面细分着色器进行曲面细分(loop算法或者catmull-Clark算法)或者曲面简化(坍缩,二次误差)
-
然后是几何着色器,由于并行化低,这里只适合进行顶点的增删等顶点着色器做不到的事
-
接下来是几何阶段的最后一步,顶点后处理,将ndc中的标准设备坐标转换为屏幕坐标,把顶点信息存入显存中
-
现在开始光栅化阶段
-
第一步图元组装,将顶点连接成面、线
- 第二步遍历三角形光栅化,将三角形“打散”到像素(片元)里,这里可能会用到插值、抗锯齿
- 第三步使用片元着色器,这里有很多功能可以实现,比如Phong/Blinn Phong等光照模型,可以自由地根据顶点数据获得想要的颜色
- 第四步混合,进行各种测试,如裁剪测试(选择要渲染的部分)、透明测试(在OpenGL ES3.0中被删除,因为可以在片段着色器上进行)、模板测试(同样是选择要渲染的部分)、深度测试(在某些实现中会使用early-z的方法,即先进行深度测试选择需要的片元,但这又会导致透明物体出现问题,需要一些hack)、透明度混合、抖动
通过了所有测试片元(像素)也不是直接画到屏幕上去的,其实这些像素可以输出到任何纹理图、缓冲或者屏幕上去,不过直接输出到屏幕不是一个好的做法,因为这样会导致画面撕裂,这就需要进行垂直同步,即输出到一个buffer中,等待buffer完全渲染完毕再交换当前显示的buffer和刚刚渲染好的buffer,这就是所谓双重缓冲。
Lecture3 Shadow(1)
Shadow Mapping
- 两趟(2-pass)算法
- 图像空间算法,不需要知道场景中的几何,但会导致自遮挡现象和走样(本质都是shadow map的分辨率太够高)
Approximation in RTR
在实时渲染中,我们更关心“近似”相等
实时渲染中一个重要的近似:\(\int_{\Omega} f(x) g(x) \mathrm{d} x \approx \frac{\int_{\Omega} f(x) \mathrm{d} x}{\int_{\Omega} \mathrm{d} x} \cdot \int_{\Omega} g(x) \mathrm{d} x\)
所以可以把渲染方程里的visibility项单独提出来
PCSS(Percentage closer soft shadows)
软阴影(阴影的界限很模糊)
PCF(Percentage Closer Filtering):最先提出来是为了解决抗锯齿,后来发现在软阴影上也有应用,做法是计算着色点与shadow map中该点深度值的比较的时候,不仅采样该像素点的深度值,同时采样周边多个shadow map点深度值,逐一比较并求平均值,从而获得了一个从0到1的连续分布,能够表现不同明暗程度的阴影。
PCSS:不同遮挡物的深度决定不同的Filter size

Lecture4 Shadow(2)

VSSM (Variance soft shadow mapping)
利用正态分布函数来求PCSS中“权”的近似值
方差可以用公式\(Var(X)=E(X^2)-E^2(X)\),其中\(X^2\)可以很方便地用shadow map的一个通道存储
Lecture5 环境光照(1)(IBL)
有向距离场SDF,可以把定义中的“安全距离”换成“安全角度”即可用于shadow


该方法叫split sum approximation
Lecture6 环境光照(2)
球谐函数(Spherical Harmonics)
用一系列定义在空间中的二维基函数(只需要两维即可表示 三维空间中的一个方向)去拟合一个三维空间函数
PRT(Precomputed Radiance Transfer):
-
我们把rendering equation分为两部分,lighting 和 light transport.
-
假设在渲染时场景中只有lighting项会发生变化(旋转,更换光照等),由于lighting是一个球面函数,因此可以用基函数来表示,在预计算阶段计算出lighting.
-
而light transport(visibility和brdf)是不变的,因此相当于对任一shading point来说,light transport项固定的,可以认为是shading point自己的性质,light transport总体来说还是一个球面函数,因此也可以写成基函数形式,是可以预计算出的.
Lecture7 全局光照(1)
RSM(Reflective Shadow Maps)
本质上还是应用一个shadow map,只不过不只存深度值,还要存世界坐标、法线、flux
LPV(Light Propagation Volumes)
Steps:
- 知道哪些点作为次级光源(virtual light point)(接受直接光照)
- 使用RSM
- 注入(inject)到场景中的3D格子中
- 划分场景为3D纹理
- 遍历每个格子,找到包含在其中的次级光源
- 将次级光源的四面八方的radiance加起来,用sh表示(2阶即4个数可表示一个格子)
- 传播(propagation)
- 一个格子传播到相邻的六个格子中去(每一个格子都认为是diffuse)
- 同样加起来用sh表示
- 重复迭代直到稳定,大概三四次(所以这是一个四趟的算法)
- 渲染
- 对于每个着色点,找到他所位于的格子
- 获取该格子所有入射的radiance
- 着色
问题:当格子划分得比较大时,可能格子内部会有遮挡关系,以至于错误地向所有六个面propagation了,但是若划分得比较小,很大幅增加性能消耗,但是可以自适应格子的大小
VXGI(Voxel Global Illumination)
也是两趟的算法,但是与RSM有一些区别:
- 次级光源:RSM中是Texel,VXGI中是Voxel
- 光线:RSM中是传播(从光源出发),VXGI中是追踪:从相机出发,打到每一个pixel上,根据pixel上代表的物体材质做出不同的操作,如果是glossy则打出一个锥形区域,diffuse则打出若干个锥形区域,打出的锥形区域与场景中一些已经存在的voxel相交,这些voxel对于Shading point的贡献可以算出来,也就是我们要对每一个shading point都做一个cone tracing,可想而知,这个速度比起LPV来说是很慢的,但是是可以优化的,暂且不提.
具体步骤:
- Light pass:记录的是直接光源从哪些范围来(绿色部分),记录各个反射表面的法线(橙色部分),通过输入方向和法线范围两个信息然后通过表面的材质,来准确的算出出射的分布,这样就比LPV认为格子表面是diffuse再用SH来压缩的方法要准确,然后建立更高层级格子的这些特性。

-
Camera pass:对于任何一个像素,知道了Camera Ray的方向。
-
对于Glossy的表面,向反射方向追踪出一个锥形(cone)区域;基于追踪出的圆锥面的大小,对格子的层级进行查询,就是对于场景中的所有体素都要判断是不是与这个锥形相交,如果相交的话就要把对于这个点的间接光照的贡献算出来(我们存储了体素的光照输入方向和法线方向,因此可以算出其输出的radiance,将cone区域内所有体素的radiance都算出来从而在shading point得到间接光照),也就是根据传播出的距离远近找对应层级的体素,然后找覆盖的范围。

-
对于diffuse的情况来说,通常考虑成若干圆锥,忽略圆锥Tracing时的重叠和空隙

总结:
LPV是把所有的次级光源发出的Radiance传播到了场景中的所有位置,只需要做一次从而让场景每个Voxel都有自己的radiance,但是由于LPV使用的3D网格特性,并且采用了SH进行表示和压缩,因此结果并不准确,而且由于使用了SH因此只能考虑diffuse的,但是速度是很快的。
VXGI把场景的次级光源记录为一个层次结构,对于一个Shading Point,我们要去通过Corn Tracing找到哪些次级光源能够照亮这个点。
Lecture8 全局光照(2)
屏幕空间(screen space)
首先我们介绍一下我们讲了这么多的几种方法都是什么类型的:
- LPV和VXGI是属于在3D空间的GI
- RSM是属于在图像空间的GI
- SSAO和SSDO是属于屏幕空间的GI
什么是屏幕空间:
- 使用的所有信息都来自“屏幕”,也就是做全局光照之前屏幕上能看到的信息,这些信息也就是做全局光照之前的直接光照信息;
- 换一个角度说,是已经渲染过的场景的后处理
- 为了与此区别我们把RSM与SM的方法称为图像空间,因为信息是来自从灯光看向的场景 所获得的信息。
SSAO(Screen Space Ambient Occlusion 屏幕空间环境光遮蔽)
为什么要AO?
- 易实现
- 加强了物体的相对位置感
什么是SSAO?
- 一个全局光照的近似
- 在屏幕空间下
关键idea:
- 我们不知道间接光照
- 假设任何点来自任何方向的间接光照都是一样的一个常数,类似于phong模型中ambient
- 但是不见得任何方向都能接受到上述的间接光照,所以需要考虑visibility
原理:

怎样在SS下?

tips:如果有法线信息,则是HBAO(Horizon Based Ambient Occlusion),可以防止出现两物体隔得很远也发生AO
Lecture9 全局光照(3)
SSDO(Screen Space Directional Occlusion)
什么是?
- SSAO的提高
- 考虑得更加精准
关键Idea:
-
不用假设入射光是常量
-
一些入射光的信息是已经知道的
-
很像RSM,但不是from RSM,而是from 相机
-
类似路径追踪,考虑与SSAO的比较,完全相反的思想:

问题:
- 只能小范围的GI
- 需要visibility
- P点对于半球上的点可见性是通过Camera对这些点的可见性来近似计算的,存在于屏幕空间中丢失信息的问题
SSR(Screen Space Reflection)
说是Reflection,也可以理解是Ray-tracing
什么是?
- 仍然是一种在RTR中实现GI的方式
- 是在屏幕空间中做光线追踪
- 不需要知道3D空间中的三角形、网格、加速结构等3D信息,只需要屏幕空间中已有的信息,也就是从camera看去场景的得到的这样一层“壳”。
两个基本任务:
- 由于我们认为它是screen space raytracing,我们考虑的是任何光线(不单单是反射光)与场景中这层壳去做求交.
- 找到交点后,算出对shading point的贡献值.
着色时:
这部分与路径追踪的方法完全相同,仅仅是把光线与场景求交变成了光线与“壳”求交,因此路径追踪的算法在这里是可以直接使用的。
对于任何一个shading point,看到的radicance就是对半球进行积分,如果是specular的物体,那么相当于光线打到物体的哪里,就用它所发出的radiance就可以.
如果是glossy情况下,同样的用蒙特卡洛多采样几根光线,不管怎么所打到的物体反射过来的radiance,一定就是shading point点接收到的incident radiance.
这里我们同样需要假设反射物/次级光源 是Diffuse的情况,地板之类的接收物可以是任何物体.
Lecture10 基于物理的材质(1)
实时渲染中的材质:
- 基于物体表面上定义的材质
- 微表面
- Disney Principled BRDF计算量比较轻量级,因此虽然产生初衷是为了能够用于离线渲染,但也可以运用在实时渲染中,这套材质的种类多效果也很不错,但也不是PBR,是基于artist的角度来考虑的。
- 基于体积上定义的材质:
- 由于光线会进入到云,烟,雾,皮肤,头发等体积里,在RTR中基于体积上要比基于表面的困难许多,我们大部分考虑的还是光线在这些体积中作用一次(single)和多次(multiple)的分离考虑方法,这个在下节课学习.
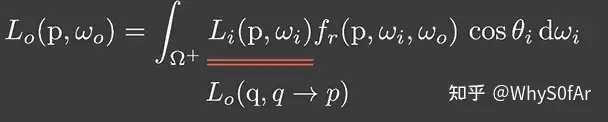
Microfacet BRDF
F : The Fresnel Term 菲涅尔项
表示观察角度与反射的关系(从一个角度看去会有多少的能量被反射)
有多少能量被反射取决于入射光的角度,当入射方向接近grazing angle掠射角度的时候,光线是被反射的最多的,也就是当你的入射方向与法线几乎垂直时候,反射的radiance是最多的.
由于光路的可逆性,我们可以认为眼睛看过去的方向是光线入射方向。
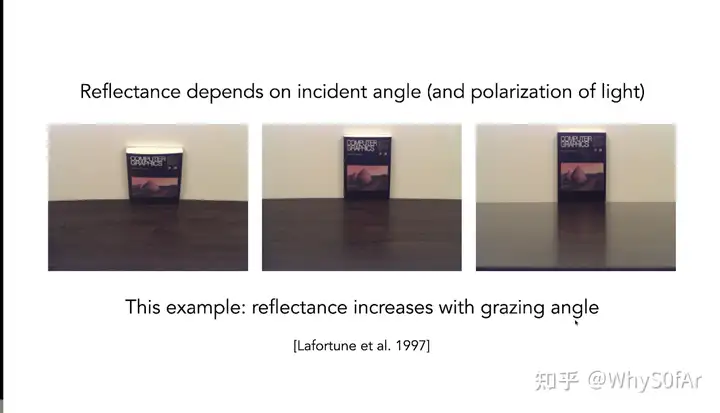
最右边的接近如grazing angle
下面是对于绝缘体反射率与角度的关系:
以河面为例,让你入射方向与河面法线平行,则会直接看到河底;如果入射方向与河面法线垂直,则能最大程度看到反射出的天空之类的.
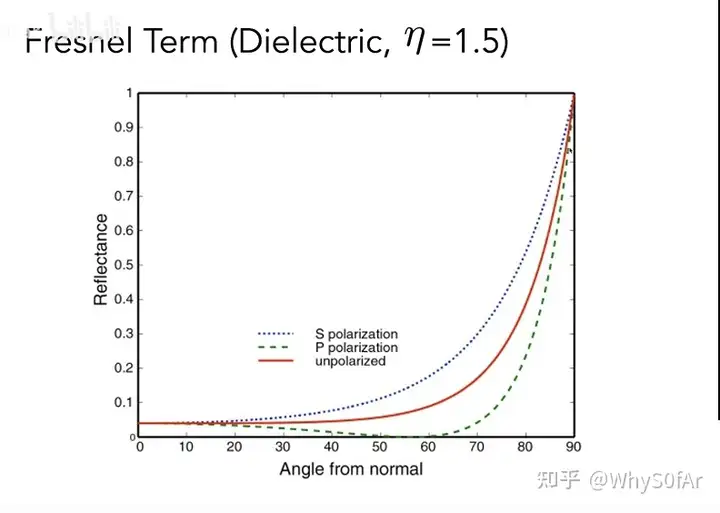
绝缘体反射率与角度的关系
下面是对于导体反射率与角度的关系,与绝缘体不同,部分会出现反常现象
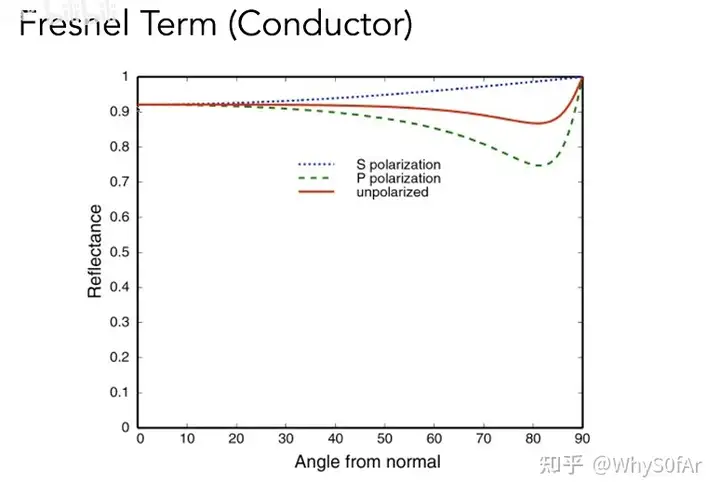
导体反射率与角度的关系
菲涅尔项告诉我们有百分之多少的能量会被反射出来.
菲涅尔项的推导时要考虑光线的S极化和P极化效果,公式比较复杂,因为要考虑不同介质,如从空气到物体表面,各自的折射率和入射角折射角,最终推导出下图中的公式。
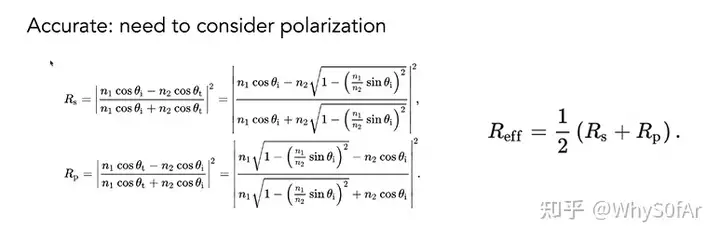
但我们平常不用这个,而是用一个简单的近似:Schlick’s approximation

我们之前讲过:
当θ->90度,cosθ=0,则R(θ)=1;
当θ->0度,cosθ=1,则R(θ)=R0;
其中R0(基础反射率)取决于物体,不同物体的R0各不相同.
D : Normal Distribution Function 表面分布函数
决定这一项的是不同微表面朝向的法线分布;
当朝向比较集中的时候会得到Glossy的结果,如果朝向特别集中指向时认为是specular的.
常用的有beckmann和GGX模型
beckmann:
其目的为了描述法线分布,因此肯定是一个关于法线方向h的函数,而h是半球上的任意一个方向,然后描述这一方向对应的值是多少,这就是NDF。
举个例子,给定向量h,如果我们的微平面中有35%与向量ℎ取向一致,则法线分布函数或者说NDF将会返回0.35。
GGX
Beckmann模型的NDF曲线与GGX模型的NDF曲线相比有一个明显的特点:
Long tail 长尾性质:
会很快衰减,但是衰减到一定程度的时候衰减速度会变慢,可以看到即使到了grazing angle(90度)时仍不为0。

这会带来两个好处:
- Beckmann的高光会逐渐消失,而GGX的高光会减少而不会消失,这就意味着高光的周围我们看到一种光晕的现象.
- GGX除了高光部分,其余部分会像Diffuse的感觉.

Beckmann模型与GGX模型的实际效果对比如图。
相同的粗糙程度下GGX的效果更加自然,因为long tail性质导致高光到非高光有一个柔和的过渡状态,而非Beckmann的高光到达grazing angle后戛然而止,我们希望的是像GGX一样的效果.

G : Geometry term 自遮挡
可以解决边缘非常亮的问题
Kulla-Conty Approximation
Lecture11 基于物理的材质(2)
放个链接,有点懒得做
Lecture12 光线追踪(1)
RTRT: Real-Time-Ray-Tracing,最重要的工作是降噪,因为算力只能支持1spp(1 sample per pixel)
而降噪最重要的idea是Temporal(时间上)
Lecture13 光线追踪(2)
滤波,双边滤波,联合双边滤波